So just to recap I’ve ran two version of the code with a scope.glitch.repeat = 1 and scope.glitch.repeat = 4. For each run I’ve captured the MCX port and then the Pos LP measurement port. I’ve also included the code and output below of a scope.glitch.repeat = 4. Let me know if there is anything else I can test/try to confirm what could be wrong…
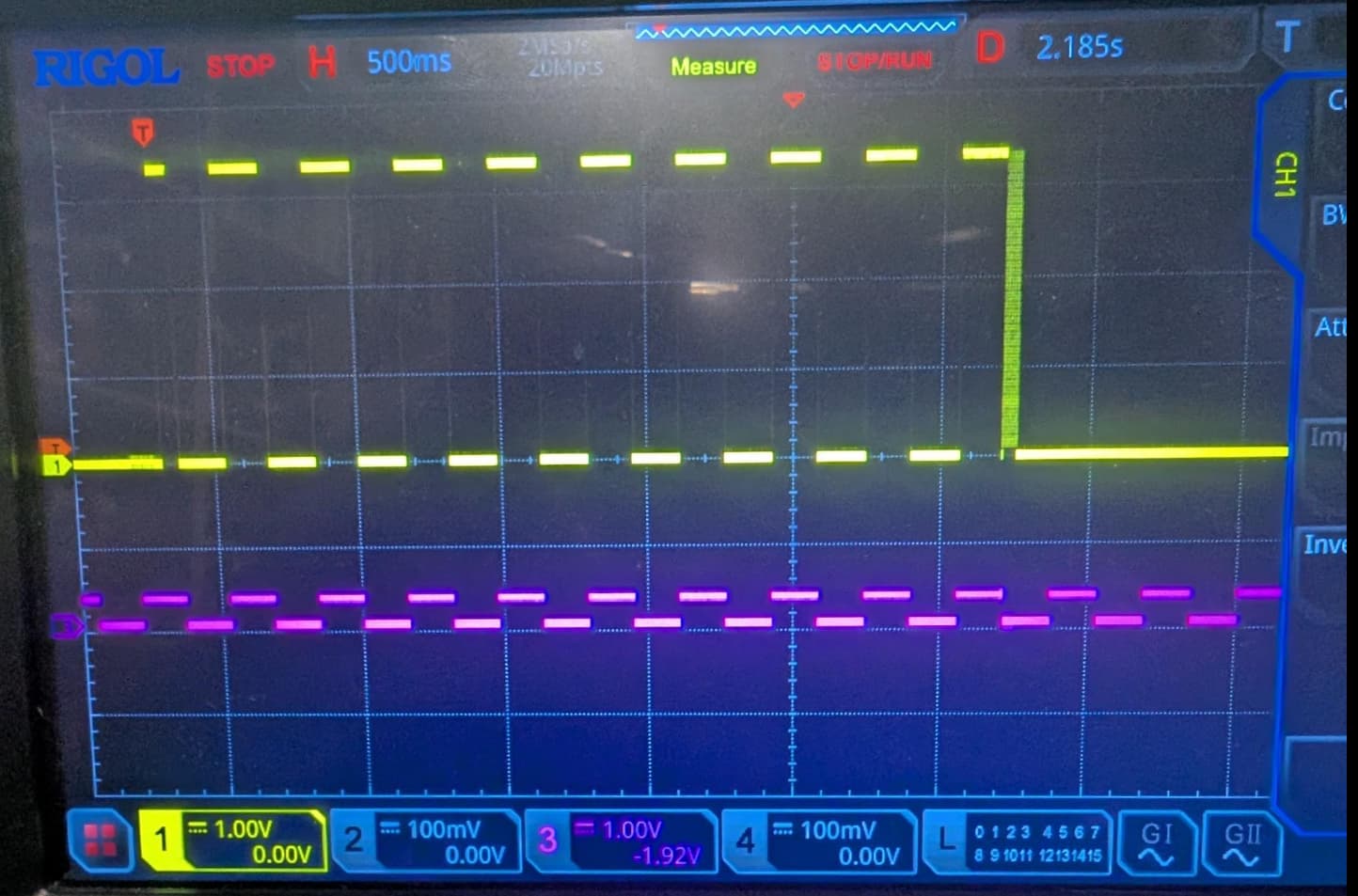
scope.glitch.repeat = 1
Yellow = MCX Port
Purple = The blinking led
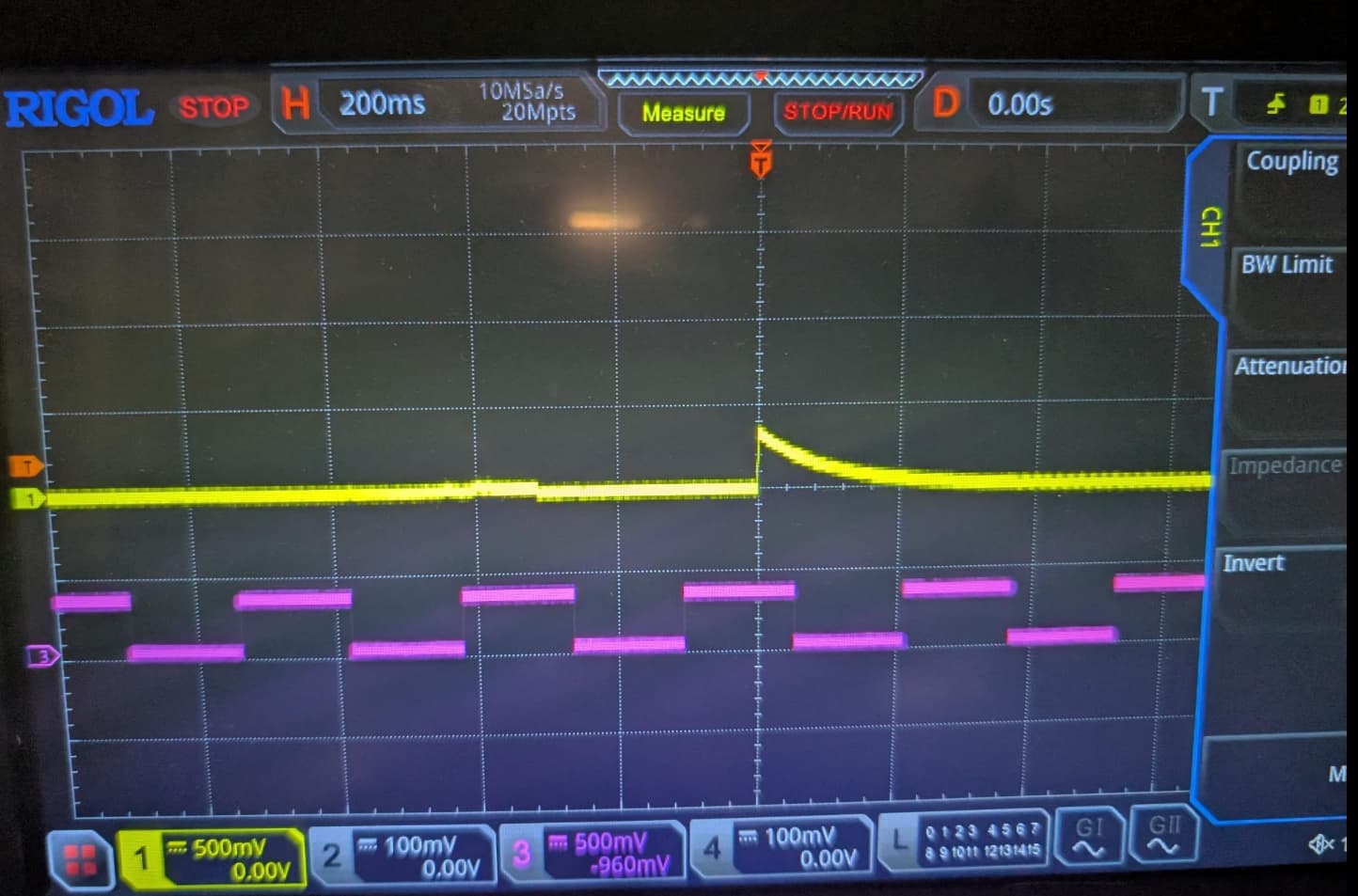
scope.glitch.repeat = 1
Yellow = Pos LP port
Purple = The blinking led
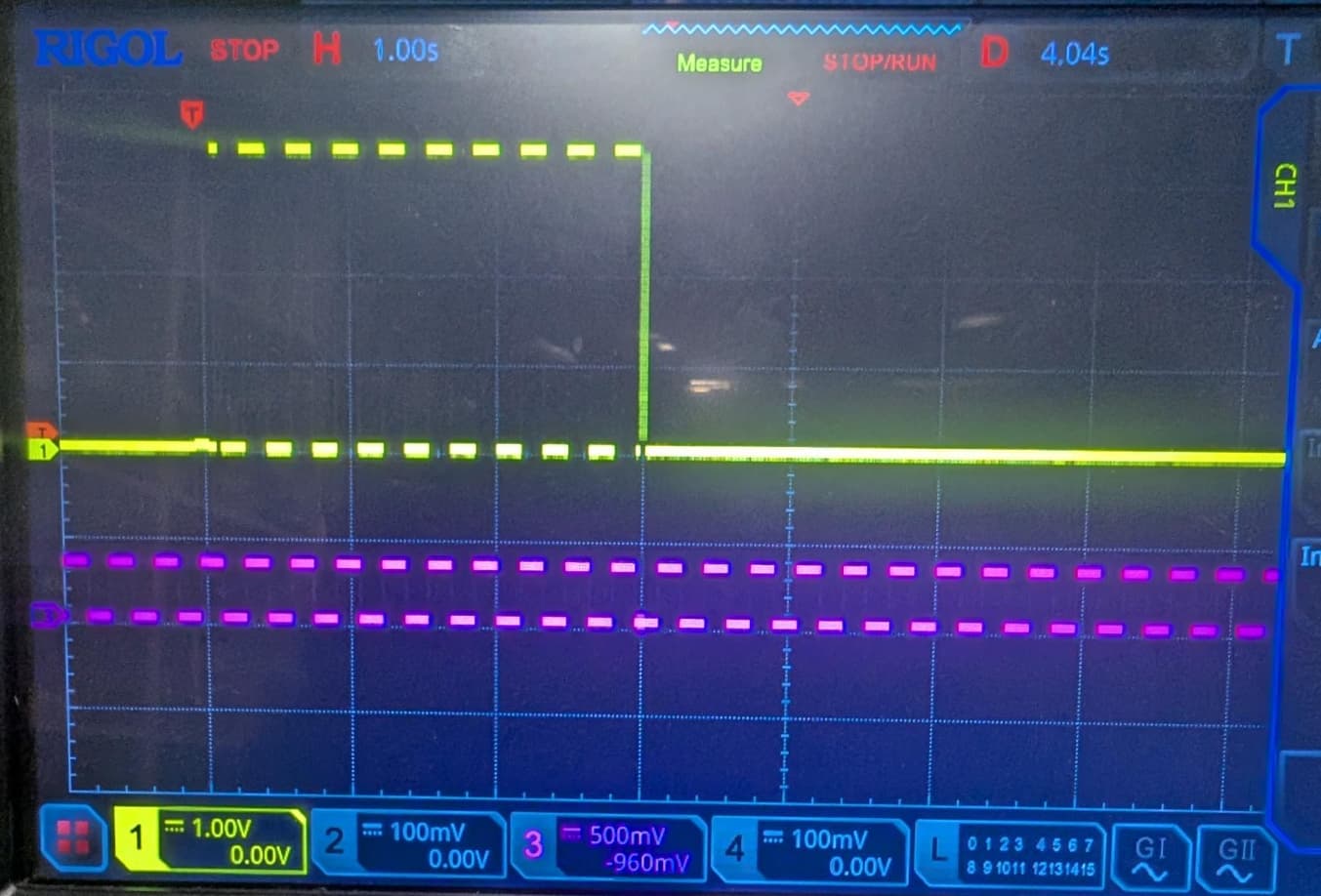
scope.glitch.repeat = 4
Yellow = MCX Port
Purple = The blinking led
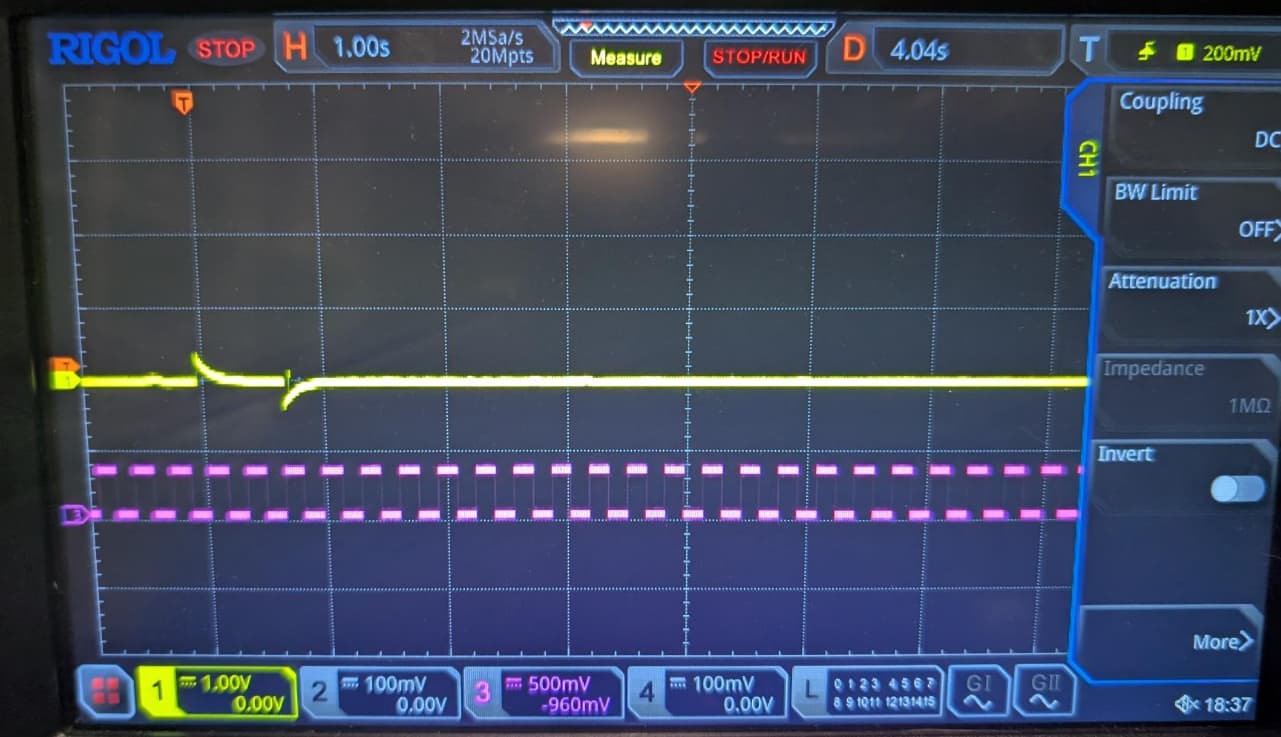
scope.glitch.repeat = 4
Yellow = Pos LP port
Purple = The blinking led
import chipwhisperer as cw
from chipwhisperer.common.results.glitch import GlitchController
from glitcher import Glitcher
from chipshouter import ChipSHOUTER
import time
import logging
import sys
port = "/dev/ttyUSB0"
def main():
scope = cw.scope(name='Husky')
scope.adc.lo_gain_errors_disabled = True
print(scope.fw_version)
print(scope.fw_version_str)
# Setup the clock to use and what speed to run it at
scope.clock.clkgen_src = 'system' # "system" or "internal": An onboard crystal
scope.clock.clkgen_freq = 40e6 # This is used for the glitching clock i.e. the higher the more accurate the
# glitch occurs from the trigger The maximum is 200MHz (Husky)
scope.clock.adc_mul = 1 # Sets a new ADC clock frequency by multiplying this value by clkgen_freq
# setting to 1 just leaves the clk freq at scope.clock.clkgen_freq
scope.adc_test()
# Setup what and how we are going to be triggered
scope.trigger.triggers = 'tio4' # This is the I/O pin 4 we will be getting the trigger signal from
scope.trigger.module = 'edge_counter' # Choose how to trigger, in this case its based on the number of edges
# we see i.e. like a clock
scope.trigger.edges = 1
scope.adc.timeout = 2
# Setup the chipshouter to glitch
scope.io.glitch_trig_mcx = "glitch" # Setup the MCX on the husky to output for a glitch
scope.glitch.enabled = True # This enables the glitch module
scope.glitch.clk_src = 'pll' # This is the clock source on the husky, so the offset and widths relate to this clock
scope.clock.pll.update_fpga_vco(600e6)
scope.glitch.trigger_src = "ext_single" # XXX ext_single in real use case
scope.glitch.output = "enable_only"
scope.io.glitch_lp = True
scope.glitch.arm_timing = "after_scope"
scope.glitch.repeat = 4 # The number of glitch pulses to generate per trigger
scope.glitch.ext_offset = [0,0] # Only works with enable_only after the glitch module is triggered, it waits for a number of clock cycles before generating glitch pulses. This delay allows the glitch to be inserted at a precise moment during the target’s execution to glitch specific instructions.
print(f"Offset: {scope.glitch.ext_offset}")
#scope.glitch.offset = 500 # only works with glitch_only
#scope.glitch.width = 500 # only works when glitch_only
print(f"Phase shift steps: {scope.glitch.phase_shift_steps}")
print(f"The glitch repeats: {scope.glitch.repeat}")
assert scope.glitch.mmcm_locked # ???
print("Scope Glitch:")
print(scope.glitch)
print("Scope Trigger:")
print(scope.trigger)
print("Scope IO:")
print(scope.io)
print("Scope Clock:")
print(scope.clock)
scope.sc.arm(False)
scope.arm()
print("ARM Scope and glitcher")
print(f"Start Capture timeout (sec): {scope.adc.timeout }")
if(scope.capture()): # Blocks until scope.adc.timeout reached or matching signal found at scope.trigger.triggers
print("Timeout occurred no edges seen")
else:
print(f"Edges seen: {scope.trigger.edges_seen}")
print(f"XADC errors: {scope.XADC.status}")
print(f"ADC errors: {scope.adc.errors}")
print(f"Extclk errors:{scope.clock.extclk_error}")
scope.dis() # Disconnect from the Husky
exit()
if __name__ == "__main__":
main()
python source/chip_whisperer_husky_forum.py
{'major': 1, 'minor': 5, 'debug': 0}
1.5.0
Offset: 0
Phase shift steps: 840
The glitch repeats: 4
Scope Glitch:
enabled = True
num_glitches = 1
clk_src = pll
mmcm_locked = True
width = 0
offset = 0
trigger_src = ext_single
arm_timing = after_scope
ext_offset = 0
repeat = 4
output = enable_only
phase_shift_steps = 840
Scope Trigger:
sequencer_enabled = False
module = edge_counter
triggers = tio4
edges = 1
Scope IO:
tio1 = serial_tx
tio2 = serial_rx
tio3 = high_z
tio4 = high_z
pdid = high_z
pdic = high_z
nrst = high_z
glitch_hp = False
glitch_lp = True
extclk_src = hs1
hs2 = None
target_pwr = True
tio_states = (1, 1, 1, 1)
cdc_settings = bytearray(b'\x01\x00\x00\x00')
aux_io_mcx = high_z
glitch_trig_mcx = glitch
Scope Clock:
clkgen_src = system
clkgen_freq = 40000000.0
adc_mul = 1
adc_freq = 40000000.0
freq_ctr = 0
freq_ctr_src = extclk
clkgen_locked = True
adc_phase = 0.0
extclk_monitor_enabled = False
extclk_error = False
extclk_tolerance = 1144409.1796875
ARM Scope and glitcher
Start Capture timeout (sec): 2
Edges seen: 1
XADC errors: good
ADC errors: gain too low error,
Extclk errors:False

