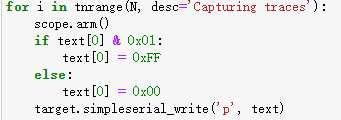
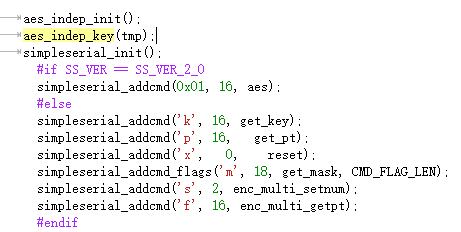
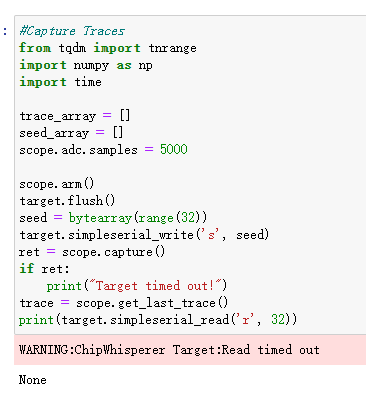
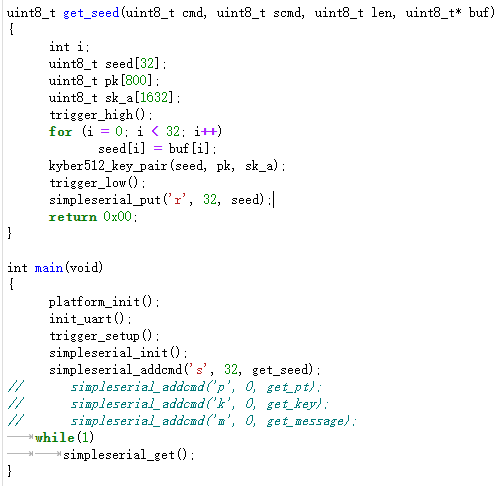
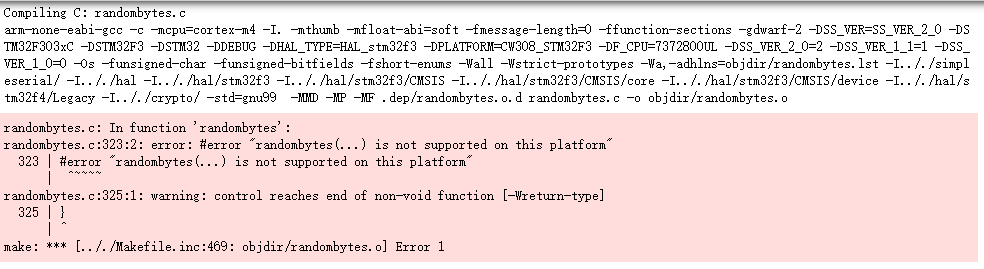
I am using the Chipwhisperer board with Kyber, which is a PQC. I tried the Kyber in VS2019 and found it working well, but when I tried to programming the firmwave, I found some errors which are not seemed in the process of VS2019.
So I guess the reason is that I didn’t define the platform used in this project , but when I try this in VS2019, I didn’t define the platform either. I don’t know how to deal with that and could you tell me which platform I should choose?
BTW, I used Chipwhisperer 5.6 in Windows and here are the source code of randombytes.c:
#if defined(linux)
#define _GNU_SOURCE
#endif /* defined(linux) */
#include “randombytes.h”
#if defined(_WIN32)
/* Windows /
// NOLINTNEXTLINE(llvm-include-order): Include order required by Windows
#include <windows.h>
#include <wincrypt.h> / CryptAcquireContext, CryptGenRandom /
#endif / defined(_WIN32) */
#if defined(linux)
/* Linux */
// We would need to include <linux/random.h>, but not every target has access
// to the linux headers. We only need RNDGETENTCNT, so we instead inline it.
// RNDGETENTCNT is originally defined in include/uapi/linux/random.h in the
// linux repo.
#define RNDGETENTCNT 0x80045200
#include <assert.h>
#include <errno.h>
#include <fcntl.h>
#include <poll.h>
#include <stdint.h>
#include <stdio.h>
#include <sys/ioctl.h>
#include <sys/stat.h>
#include <sys/syscall.h>
#include <sys/types.h>
#include <unistd.h>
// We need SSIZE_MAX as the maximum read len from /dev/urandom
#if !defined(SSIZE_MAX)
#define SSIZE_MAX (SIZE_MAX / 2 - 1)
#endif /* defined(SSIZE_MAX) /
#endif / defined(linux) */
#if defined(_WIN32)
static int randombytes_win32_randombytes(void *buf, const size_t n) {
HCRYPTPROV ctx;
BOOL tmp;
tmp = CryptAcquireContext(&ctx, NULL, NULL, PROV_RSA_FULL,
CRYPT_VERIFYCONTEXT);
if (tmp == FALSE) {
return -1;
}
tmp = CryptGenRandom(ctx, (DWORD)n, (BYTE *)buf);
if (tmp == FALSE) {
return -1;
}
tmp = CryptReleaseContext(ctx, 0);
if (tmp == FALSE) {
return -1;
}
return 0;
}
#endif /* defined(_WIN32) */
#if defined(linux) && defined(SYS_getrandom)
static int randombytes_linux_randombytes_getrandom(void buf, size_t n) {
/ I have thought about using a separate PRF, seeded by getrandom, but
* it turns out that the performance of getrandom is good enough
* (250 MB/s on my laptop).
/
size_t offset = 0, chunk;
long int ret;
while (n > 0) {
/ getrandom does not allow chunks larger than 33554431 */
chunk = n <= 33554431 ? n : 33554431;
do {
ret = syscall(SYS_getrandom, (char )buf + offset, chunk, 0);
} while (ret == -1 && errno == EINTR);
if (ret < 0) {
return (int) ret;
}
offset += (size_t) ret;
n -= (size_t) ret;
}
assert(n == 0);
return 0;
}
#endif / defined(linux) && defined(SYS_getrandom) */
#if defined(linux) && !defined(SYS_getrandom)
static int randombytes_linux_read_entropy_ioctl(int device, int *entropy) {
return ioctl(device, RNDGETENTCNT, entropy);
}
static int randombytes_linux_read_entropy_proc(FILE *stream, int *entropy) {
int retcode;
do {
rewind(stream);
retcode = fscanf(stream, “%d”, entropy);
} while (retcode != 1 && errno == EINTR);
if (retcode != 1) {
return -1;
}
return 0;
}
static int randombytes_linux_wait_for_entropy(int device) {
/* We will block on /dev/random, because any increase in the OS’ entropy
* level will unblock the request. I use poll here (as does libsodium),
* because we don’t actually want to read from the device. */
enum { IOCTL,
PROC
} strategy = IOCTL;
const int bits = 128;
struct pollfd pfd;
int fd;
FILE *proc_file;
int retcode,
retcode_error = 0; // Used as return codes throughout this function
int entropy = 0;
/* If the device has enough entropy already, we will want to return early */
retcode = randombytes_linux_read_entropy_ioctl(device, &entropy);
if (retcode != 0 && errno == ENOTTY) {
/* The ioctl call on /dev/urandom has failed due to a ENOTTY (i.e.
* unsupported action). We will fall back to reading from
* `/proc/sys/kernel/random/entropy_avail`. This is obviously less
* ideal, but at this point it seems we have no better option. */
strategy = PROC;
// Open the entropy count file
proc_file = fopen("/proc/sys/kernel/random/entropy_avail", "r");
} else if (retcode != 0) {
// Unrecoverable ioctl error
return -1;
}
if (entropy >= bits) {
return 0;
}
do {
fd = open("/dev/random", O_RDONLY);
} while (fd == -1 && errno == EINTR); /* EAGAIN will not occur */
if (fd == -1) {
/* Unrecoverable IO error */
return -1;
}
pfd.fd = fd;
pfd.events = POLLIN;
for (;;) {
retcode = poll(&pfd, 1, -1);
if (retcode == -1 && (errno == EINTR || errno == EAGAIN)) {
continue;
} else if (retcode == 1) {
if (strategy == IOCTL) {
retcode =
randombytes_linux_read_entropy_ioctl(device, &entropy);
} else if (strategy == PROC) {
retcode =
randombytes_linux_read_entropy_proc(proc_file, &entropy);
} else {
return -1; // Unreachable
}
if (retcode != 0) {
// Unrecoverable I/O error
retcode_error = retcode;
break;
}
if (entropy >= bits) {
break;
}
} else {
// Unreachable: poll() should only return -1 or 1
retcode_error = -1;
break;
}
}
do {
retcode = close(fd);
} while (retcode == -1 && errno == EINTR);
if (strategy == PROC) {
do {
retcode = fclose(proc_file);
} while (retcode == -1 && errno == EINTR);
}
if (retcode_error != 0) {
return retcode_error;
}
return retcode;
}
static int randombytes_linux_randombytes_urandom(void *buf, size_t n) {
int fd;
size_t offset = 0, count;
ssize_t tmp;
do {
fd = open(“/dev/urandom”, O_RDONLY);
} while (fd == -1 && errno == EINTR);
if (fd == -1) {
return -1;
}
if (randombytes_linux_wait_for_entropy(fd) == -1) {
return -1;
}
while (n > 0) {
count = n <= SSIZE_MAX ? n : SSIZE_MAX;
tmp = read(fd, (char *)buf + offset, count);
if (tmp == -1 && (errno == EAGAIN || errno == EINTR)) {
continue;
}
if (tmp == -1) {
return -1; /* Unrecoverable IO error */
}
offset += tmp;
n -= tmp;
}
assert(n == 0);
return 0;
}
#endif /* defined(linux) && !defined(SYS_getrandom) */
int randombytes(uint8_t buf, size_t n) {
#if defined(linux)
#if defined(SYS_getrandom)
/ Use getrandom system call /
return randombytes_linux_randombytes_getrandom(buf, n);
#else
/ When we have enough entropy, we can read from /dev/urandom /
return randombytes_linux_randombytes_urandom(buf, n);
#endif
#elif defined(_WIN32)
/ Use windows API */
return randombytes_win32_randombytes(buf, n);
#else
#error “randombytes(…) is not supported on this platform”
#endif
}